As I mentioned before, I intend to try to retrofit the an old Meade Starfinder equatorial mount with 2 steppers and an AstroEQ.
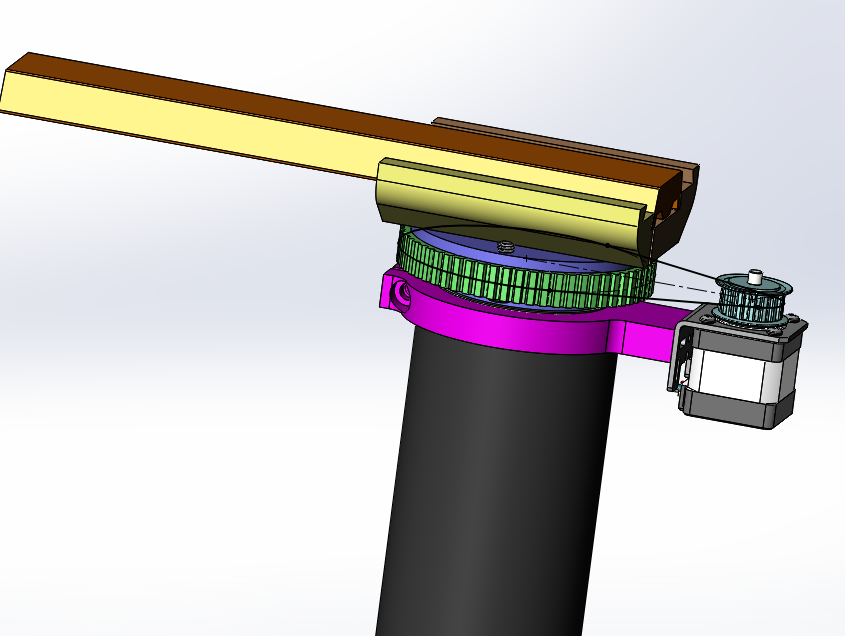
For the declination axis, I can mount a 60T timing gear to a 15T pinion on the stepper. Using gears and belt from Servocity and the NEMA 14 stepper and bracket from Pololu. The bearing collar, servo arm clamp are custom machined to adopt onto features already machined into the Meade mount.
NEMA 14
https://www.pololu.com/product/1209General specifications
Shaft type: 5 mm "D"
Steps per revolution: 200
Current rating: 1000 mA2
Voltage rating: 2.7 V
Holding torque: 20 oz·in
Resistance: 2.7 Ohm2
Inductance per phase: 4.3 mH
Number of leads: 4
Lead length: 30 cm
On the RA axis, there is already a ~4" gear and worm gear pair. I am replacing the 120VAC vintage clock drive motor with a NEMA 11 motor. It seems theres only space for a NEMA 11 if i want to fit in the same enclosure and I will have to have the shaft custom machined due to the worm gear end. I'm sort of wondering if its even worth the bother to fit a small motor, made expensive because of the custom shaft. But I dont mind if someone (Tom?) can confirm the torque and specs are compatible and sufficient. If not, then I should be able to create custom machined brackets and coupler to fit a larger stepper in there since I'm not space constrained, but definitely more complicated.

NEMA 11 28x32
https://www.pololu.com/product/1205General specifications
Shaft type: 5 mm "D"
Steps per revolution: 200
Current rating: 670 mA2
Voltage rating: 3.8 V
Holding torque: 8.3 oz·in
Resistance: 5.6 Ohm2
Inductance per phase: 4.2 mH
Number of leads: 4
Lead length: 30 cm
Any thoughts before I go and buy the parts?
I intend to mount a AT6RC Astrotech 6" richey. Not sure what kind of guiding yet.

 Author
Topic: Retrofitting AstroEQ onto old Meade Starfinder GEM (Read 7448 times)
Author
Topic: Retrofitting AstroEQ onto old Meade Starfinder GEM (Read 7448 times)